 Deutsch
Deutsch English
English Русский
Русский Español
Español



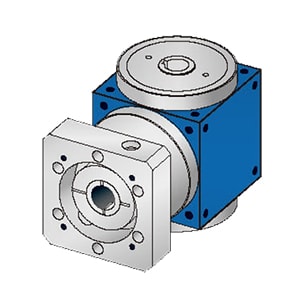










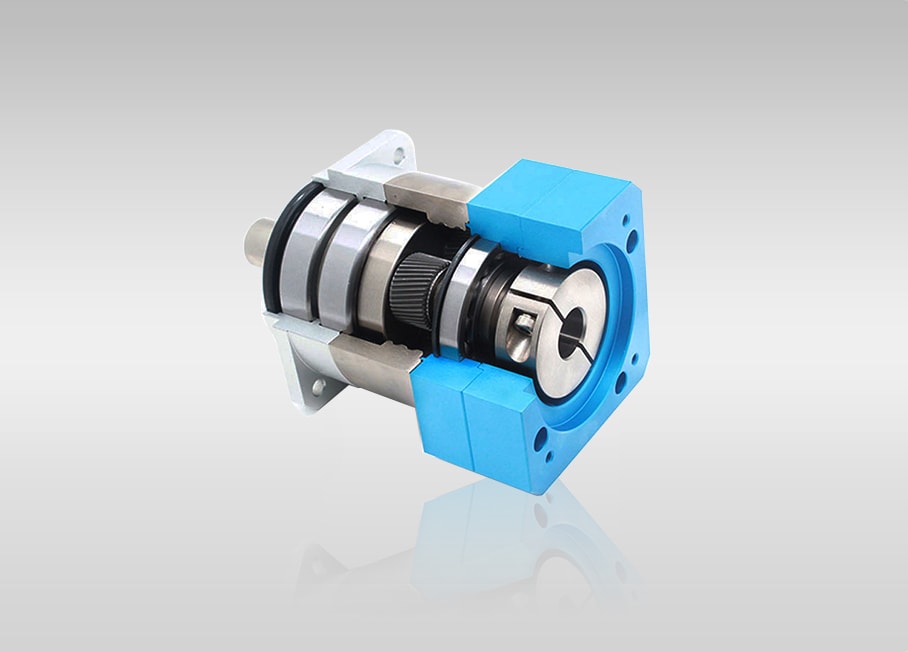
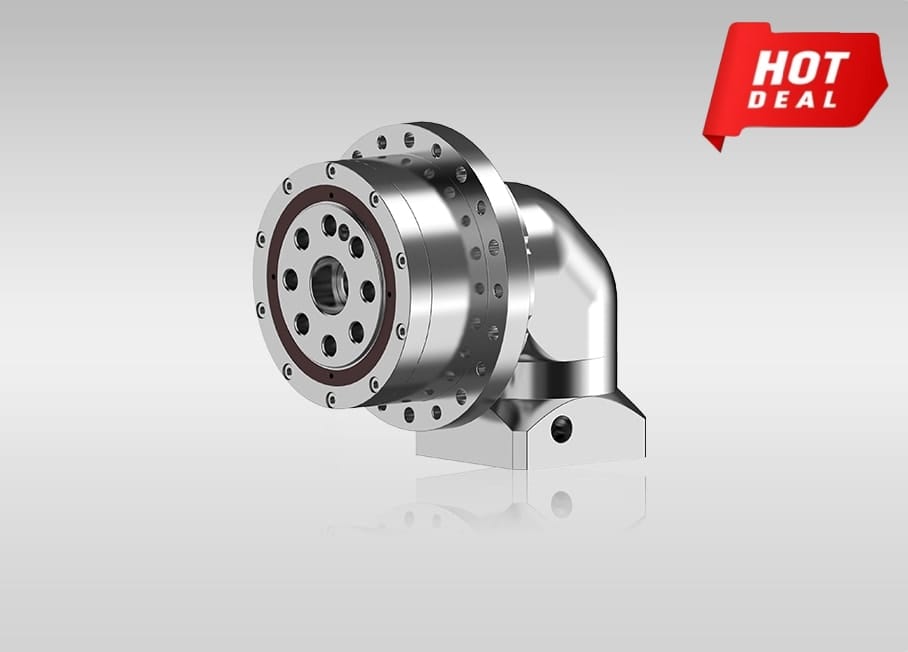
Funktionen von DG & DGT-Reduzierer
1. Kompakte Struktur
Planetengetriebe zeichnen sich durch die volle Raumausnutzung aus, da Lager und Übersetzungsverhältnis auf begrenztem Raum ausgelegt sind, sodass das Produkt kleiner und platzsparender als herkömmliche Untersetzungsgetriebe ist.
2. Hohe Effizienz
Wenn das Planetenradsatz läuft, befindet es sich in einem völlig engen Eingriffszustand, wodurch die Gefahr einer Zahnradkollision oder einer Getriebebeschädigung durch teilweisen Eingriff verringert wird.
Die Eigenschaft des vollständig engen Eingriffs ermöglicht einen Effizienzverlust jedes Zahnradgetriebes von nur 3 %.
Diese Art von Übertragungsmodus kann sicherstellen, dass die kinetische Energie in das Untersetzungsgetriebe und dann in das Ende des Mechanismus eingespeist wird, während gleichzeitig eine hohe Übertragungseffizienz aufrechterhalten wird und mechanische Verluste durch Reibung und Schlupf der Innenräder vermieden werden.
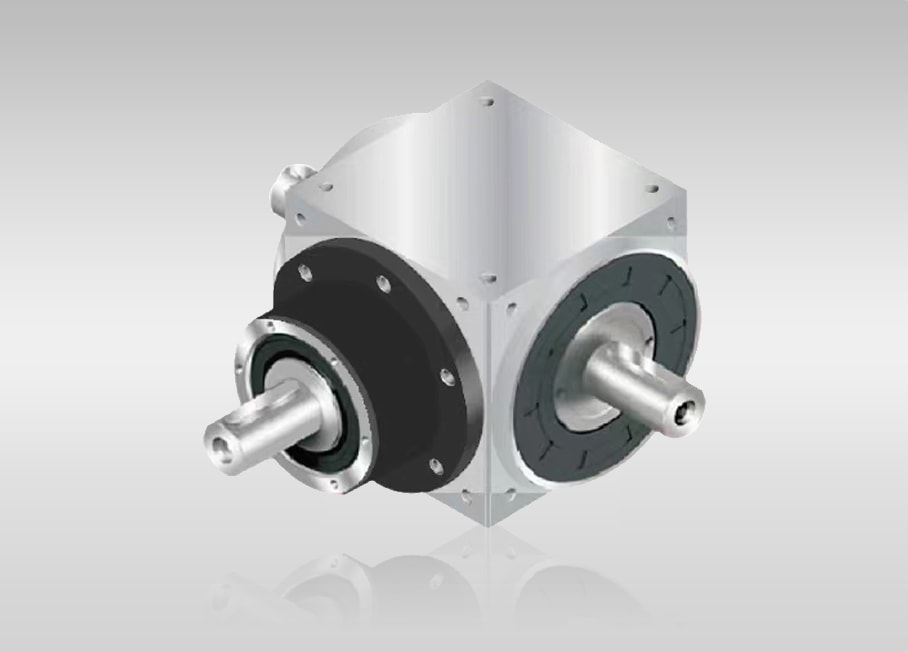
3. Hohe axiale radiale Belastbarkeit
Die Abtriebswelle des Untersetzungsgetriebes von Pin Hong Technology verwendet einen Stil mit großer Spannweite, sodass das Lager an beiden Enden der Abtriebswelle angeordnet ist.
Diese Konstruktion kann die auf die Abtriebswelle wirkende Kraft effektiv verteilen und die Belastung des Lagers reduzieren.
Mit anderen Worten: Das Produkt gleicher Größe weist eine erhöhte Tragfähigkeit in axialer radialer Richtung auf.
4. Hohe Festigkeit
Der Zahnradsatz des Untersetzungsgetriebes ist sehr stark und stabil, und die Dicke des Zahnrads verteilt die auf das Zahnrad wirkende Last. Der großspannige Lagersatz sorgt für eine stabile Struktur;
Der Präzisionszahnradsatz verteilt die Last auf jedes Planetenrad unter engem Eingriff, um der Drehmomentbelastung standzuhalten.
Mit diesem Design kann Pin Hong bessere Produkte auf den Markt bringen.
5. Hohe Stabilität
Die Präzisionsbearbeitung der Pin Hong-Technologie stellt sicher, dass die Produkte koaxial und konzentrisch sind, und das mit großer Spannweite ausgelegte Lager verleiht dem Produkt eine hervorragende Stabilität.
Zeichnungen von DG & DGT-Reduzierer

Parameter von DG & DGT-Reduzierer
| Size | DG060 | DG090 | DG115 | DG142 | DG180 | DG220 | |
|---|---|---|---|---|---|---|---|
| D1 | 70 | 100 | 130 | 165 | 215 | 250 | |
| D2 | 5.2 | 6.8 | 8.6 | 10.5 | 13 | 17 | |
| *D3 | 16 | 22 | 32 | 40 | 55 | 75 | |
| D4 | 50 | 80 | 110 | 130 | 160 | 180 | |
| D5 | 25 | 35 | 65 | 65 | 100 | 80 | |
| C1 | 37 | 48 | 65 | 97 | 105 | 138 | |
| C2 | 7 | 10 | 12 | 15 | 20 | 30 | |
| C3 | 28.5 | 36.5 | 51 | 79 | 82 | 105 | |
| C4 | 2 | 3 | 5 | 5 | 6 | 7 | |
| C5 | 25 | 32 | 40 | 65 | 70 | 90 | |
| C6 | 60 | 90 | 115 | 142 | 180 | 220 | |
| C7 | 16 | 18 | 20 | 17 | 20 | 30 | |
| C8 | L1 | 78 | 103.5 | 125.5 | 154.5 | 188 | 219.5 |
| L2 | 100 | 129.5 | 155.5 | 192.5 | 233 | 269.5 | |
| C9 | 20 | 25.5 | 25.5 | 34.5 | 35 | 44.5 | |
| C10 | 13 | 18 | 18 | 22.5 | 23 | 28.5 | |
| L | L1 | 135 | 177 | 216 | 286 | 328 | 402 |
| L2 | 157 | 203 | 246 | 324 | 373 | 452 | |
| M | M5XP0.8X12.5 | M8XP1.25X20 | M12XP1.75X30 | M16XP2.0X40 | M20XP2.5X50 | M5XP02.5X50 | |
| K1 | 5 | 6 | 10 | 12 | 16 | 20 | |
| K2 | 18 | 24.5 | 35 | 43 | 59 | 79.5 | |
| d | ≤19 | ≤24 | ≤32 | ≤38 | ≤55 | ≤55 | |
| △A | 50 | 80 | 110 | 130 | 160 | 200 | |
| B | 6 | 10 | 10 | 10 | 11 | 12 | |
| △F | ≤33.5 | ≤46 | ≤53 | ≤66 | ≤82.5 | ≤88.5 | |
△: Die durch dieses Symbol gekennzeichnete Sondergröße variiert je nach Kundenwunsch und Servomotoren.
Hinweis: Dreistufig ist in dieser Tabelle nicht enthalten. Bitte wenden Sie sich bei Bedarf an unseren Vertrieb.
| Size | Stage | Ratios | DG060 | DG090 | DG115 | DG142 | DG180 | DG220 |
|---|---|---|---|---|---|---|---|---|
| Rated output torque(Nm) | 1 | 3 | 55 | 130 | 208 | 342 | 588 | 1140 |
| 4 | 50 | 140 | 290 | 542 | 1050 | 1700 | ||
| 5 | 60 | 160 | 330 | 650 | 1200 | 2000 | ||
| 6 | 55 | 150 | 310 | 600 | 1100 | 1900 | ||
| 7 | 50 | 140 | 300 | 550 | 1100 | 1800 | ||
| 8 | 43 | 114 | 247 | 475 | 950 | 1520 | ||
| 10 | 40 | 100 | 230 | 450 | 900 | 1500 | ||
| 2 | 9 | 55 | 130 | 208 | 342 | 588 | 1140 | |
| 12 | 50 | 140 | 290 | 542 | 1050 | 1700 | ||
| 15 | 55 | 130 | 208 | 342 | 588 | 1140 | ||
| 16 | 50 | 140 | 290 | 542 | 1050 | 1700 | ||
| 20 | 50 | 140 | 290 | 542 | 1050 | 1700 | ||
| 25 | 60 | 160 | 330 | 650 | 1200 | 2000 | ||
| 28 | 50 | 140 | 300 | 550 | 1100 | 1800 | ||
| 30 | 55 | 150 | 310 | 600 | 1100 | 1900 | ||
| 32 | 43 | 114 | 247 | 475 | 950 | 1520 | ||
| 35 | 50 | 140 | 300 | 550 | 1100 | 1800 | ||
| 40 | 43 | 114 | 247 | 475 | 950 | 1520 | ||
| 50 | 60 | 160 | 330 | 650 | 1200 | 2000 | ||
| 60 | 55 | 150 | 310 | 600 | 1100 | 1900 | ||
| 70 | 50 | 140 | 300 | 550 | 1100 | 1800 | ||
| 80 | 43 | 114 | 247 | 475 | 950 | 1520 | ||
| 100 | 40 | 100 | 230 | 450 | 900 | 1500 | ||
| Max output torque(Nm) | 1,2 | 3~100 | 3.0 times Batedoatpat torque | |||||
| Return backlash(arcmin) | 1 | 3~10 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 |
| 2 | 9~100 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | |
| Rated input speed(rpm)) | 1,2 | 3~100 | 5000 | 4000 | 4000 | 3000 | 3000 | 2000 |
| Max input speed(rpm) | 10000 | 8000 | 8000 | 6000 | 6000 | 4000 | ||
| Weight (kg) | 1 | 3~10 | 1.5 | 4.5 | 9 | 17 | 34 | 53 |
| 2 | 9~100 | 2.2 | 6 | 11 | 21 | 40 | 74 | |
| Torsional stiffness(Nm/arcmin) | 1,2 | 3~100 | 2.5 | 5 | 10 | 25 | 70 | 115 |
| Allowable Radial Load(N) | 920 | 1800 | 3350 | 4200 | 5800 | 17500 | ||
| Allowable axial load(N) | 460 | 890 | 1700 | 2100 | 2900 | 8750 | ||
| Noise(dB) | ≤58 | ≤60 | ≤63 | ≤65 | ≤67 | ≤70 | ||
| Life(hrs) | 20000 | |||||||
| Efficency(%) | L1,L2 | 3~100 | ≥97 | |||||
| L1 | 3~10 | ≥94 | ||||||
| Temperature(°C) | L2 | 12~100 | -10℃~+90℃ | |||||
| Degree of protection | L1,L2 | 3~100 | IP65 | |||||
| Grease | L1,L2 | 3~100 | Fully Synthetic Grease | |||||
| Moment of inertia(kg.cm) | 1 | 3 | 0.16 | 0.61 | 3.25 | 9.21 | 28.98 | 69.61 |
| 4 | 0.14 | 0.48 | 2.74 | 7.54 | 23.67 | 54.37 | ||
| 5 | 0.13 | 0.47 | 2.71 | 7.42 | 23.29 | 53.27 | ||
| 6 | 0.13 | 0.45 | 2.65 | 7.25 | 22.75 | 51.72 | ||
| 7 | 0.13 | 0.45 | 2.62 | 7.14 | 22.48 | 50.97 | ||
| 8 | 0.13 | 0.44 | 2.58 | 7.07 | 28.98 | 50.84 | ||
| 10 | 0.13 | 0.44 | 2.57 | 7.03 | 58.98 | 50.56 | ||
| 2 | 9 | 0.16 | 0.61 | 3.25 | 9.21 | 28.98 | 69.61 | |
| 12 | 0.16 | 0.61 | 3.25 | 9.21 | 29.98 | 69.61 | ||
| 15 | 0.16 | 0.61 | 3.25 | 9.21 | 29.98 | 69.61 | ||
| 16 | 0.14 | 0.48 | 2.74 | 7.54 | 23.67 | 54.27 | ||
| 20 | 0.14 | 0.48 | 2.74 | 7.54 | 23.67 | 54.27 | ||
| 25 | 0.13 | 0.47 | 2.71 | 7.42 | 23.29 | 53.27 | ||
| 28 | 0.14 | 0.48 | 2.74 | 7.54 | 23.67 | 54.37 | ||
| 30 | 0.16 | 0.16 | 3.25 | 9.21 | 28.98 | 69.61 | ||
| 32 | 0.14 | 0.48 | 2.74 | 7.54 | 23.67 | 54.37 | ||
| 35 | 0.13 | 0.47 | 2.71 | 7.42 | 23.29 | 53.27 | ||
| 40 | 0.14 | 0.48 | 2.74 | 7.54 | 23.67 | 54.37 | ||
| 50 | 0.13 | 0.47 | 2.71 | 7.42 | 23.29 | 53.27 | ||
| 60 | 0.13 | 0.45 | 2.65 | 7.25 | 22.75 | 51.72 | ||
| 70 | 0.13 | 0.45 | 2.62 | 7.14 | 22.48 | 50.97 | ||
| 80 | 0.13 | 0.44 | 2.58 | 7.07 | 22.59 | 50.84 | ||
| 100 | 0.13 | 0.44 | 2.57 | 7.03 | 22.14 | 50.56 | ||
Anwendungsindustrie
Geeignet für ein breites Anwendungsspektrum
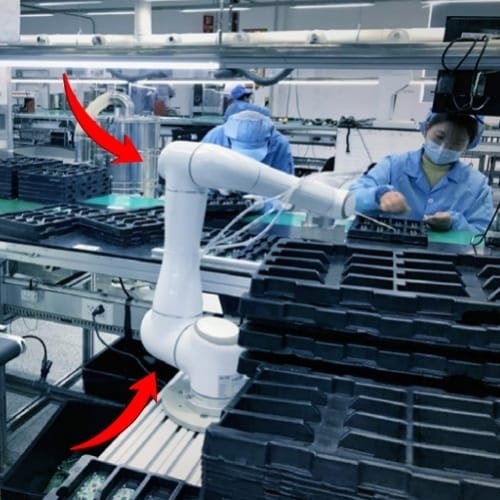
Kooperativer Roboter
Mehrgelenkmaschine

Laser-Schneide-Maschine
Werkzeugmaschinen, Schleifmaschinen

PARALLELMANIPULATOR
Scara-Roboter, Spinnenhand...

INDUSTRIEROBOTER
Manipulator, Achsroboter usw

Humanoider Roboter
Bionischer Roboter, Laufroboter
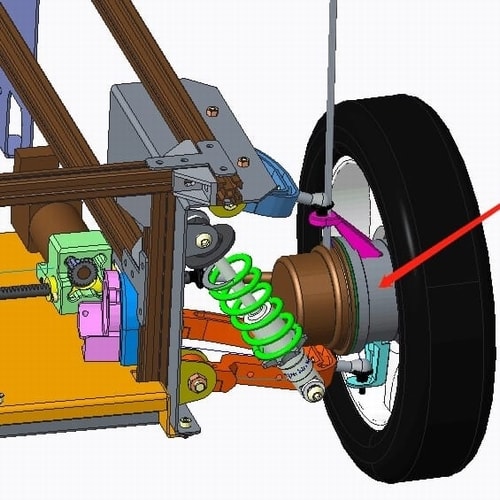
AGV CAE
Lagerlogistik-AGV-Wagen
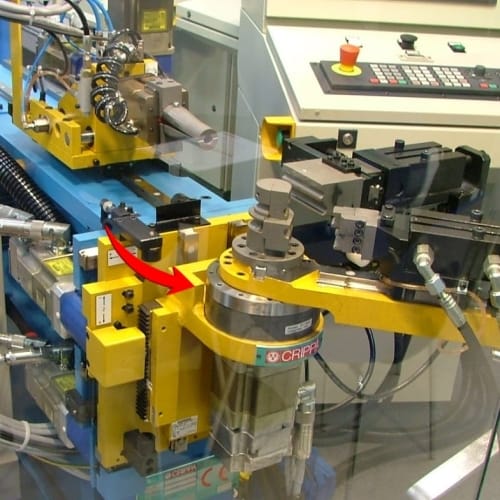
WERKZEUGMASCHINE
Rohrbiegemaschine...
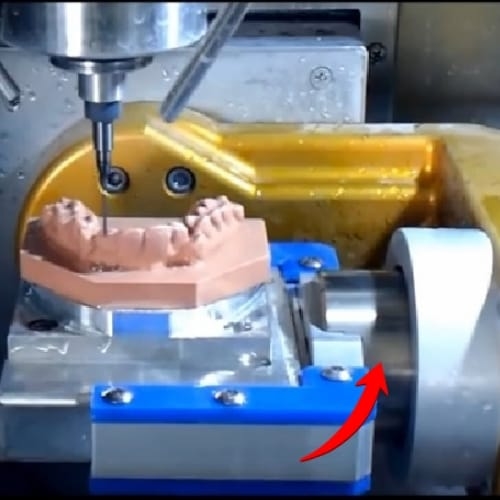
CNC-Schnitzmaschine
Schnitzen und Drucken von Zahnprothesen

EXTERNE ROBOTER
Gewichtsrehabilitation...
Fabriken von Fubao Mechanic Tech











Jetzt Angebot