 Deutsch
Deutsch English
English Русский
Русский Español
Español











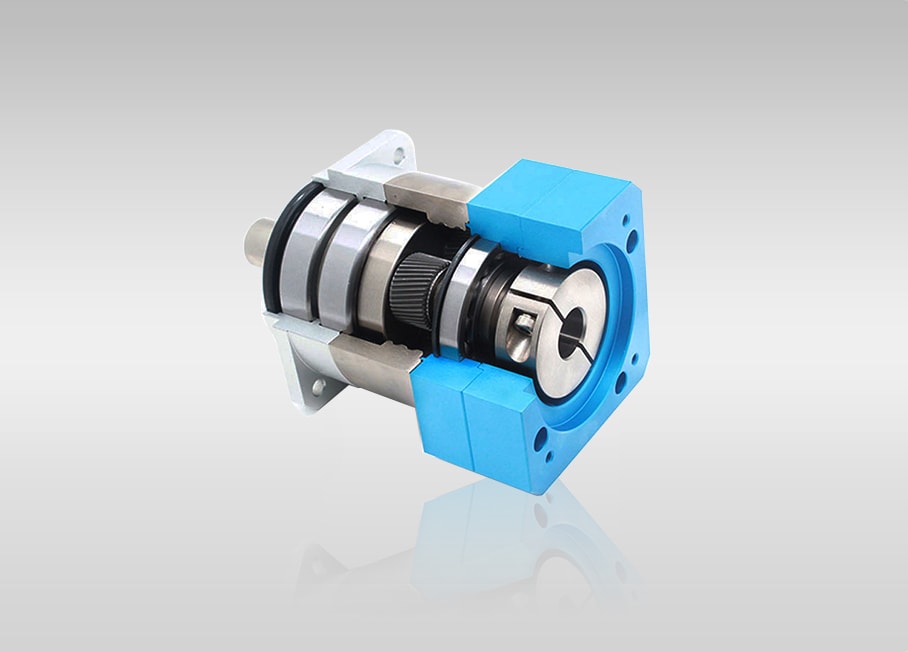
Merkmale des Planetengetriebes der WABR-Serie
Das Getriebe besteht aus hochwertigem legiertem Stahl, der mit Kohlenstoffnitrieren behandelt wurde, um die beste Verschleißfestigkeit und Schlagzähigkeit zu erzielen. Die Finite-Elemente-Analyse der Getriebefestigkeit wird mithilfe der ANSYS-Technologie durchgeführt. Gleichzeitig werden die Form und Steigung der Zahnoberfläche getrimmt, um Stöße und Geräusche beim Eingriff des Getriebes zu reduzieren und die Lebensdauer des Getriebezugs zu erhöhen.
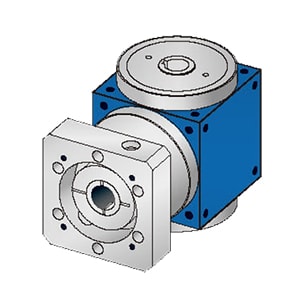
Der Abtriebsplanetenträger verfügt über eine integrierte (doppelte Stütz-)Strukturkonstruktion, und die vorderen und hinteren Lager sind mit einer großen Spannweite im Gehäuse verteilt, um eine stabile integrierte Struktur zu bilden, die eine hohe Torsionssteifigkeit und Präzision gewährleistet.
Das Ringgetriebe und das Abtriebsgehäuse haben ein integriertes Design, bestehen aus hochwertigem Stahl und werden durch Warmschmieden geformt, um eine hohe Materialdichte zu erreichen.
Das integrierte Design kann sicherstellen, dass alle geometrischen Abmessungen gleichzeitig verarbeitet werden, und weist im Vergleich zu anderen Einbau- und Aufsteckstrukturen eine höhere Präzision und Festigkeit auf. Die Eingangswelle und die Verriegelungsvorrichtung verfügen über ein integriertes Design und die Doppelbolzen sind symmetrisch verteilt, um ein dynamisches Gleichgewicht zu erreichen.
Gleichzeitig wird durch die starke Verriegelung der Doppelbolzen ein Durchrutschen der Elektrowelle wirksam verhindert und eine hochpräzise und spielarme Kraftübertragung realisiert.
Das Getriebe besteht aus hochwertigem legiertem Stahl, der mit Kohlenstoffnitrieren behandelt wurde, um die beste Verschleißfestigkeit und Schlagzähigkeit zu erzielen. Die Finite-Elemente-Analyse der Getriebefestigkeit wird mithilfe der ANSYS-Technologie durchgeführt. Gleichzeitig werden die Form und Steigung der Zahnoberfläche getrimmt, um Stöße und Geräusche beim Eingriff des Getriebes zu reduzieren und die Lebensdauer des Getriebezugs zu erhöhen.
Der Abtriebsplanetenträger verfügt über eine integrierte (doppelte Stütz-)Strukturkonstruktion, und die vorderen und hinteren Lager sind mit einer großen Spannweite im Gehäuse verteilt, um eine stabile integrierte Struktur zu bilden, die eine hohe Torsionssteifigkeit und Präzision gewährleistet.
Zeichnungen des Planetengetriebes der WABR-Serie
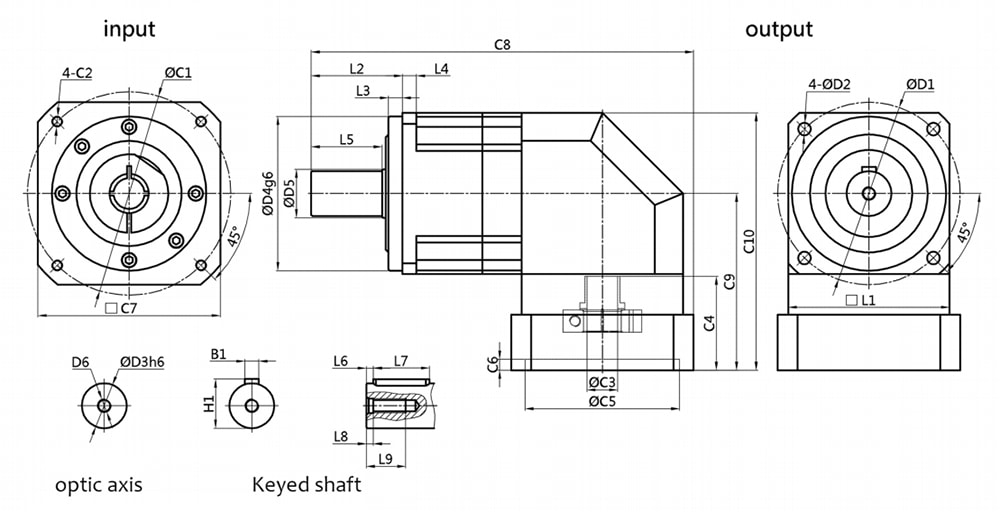
Parameter des Planetengetriebes der WABR-Serie
| Size | WABR042 | WABR060 | WABR090 | WABR115 | WABR142 | WABR180 | WABR220 | |
|---|---|---|---|---|---|---|---|---|
| D1 | 50 | 70 | 100 | 130 | 165 | 215 | 250 | |
| D2 | 3.4 | 5.5 | 6.5 | 9 | 10.5 | 13 | 17 | |
| D3h6 | 13 | 16 | 22 | 32 | 40 | 55 | 75 | |
| D4g6 | 35 | 50 | 80 | 110 | 130 | 160 | 180 | |
| D5 | 16.5 | 24.5 | 34.5 | 34.5 | 48 | 65 | 95 | |
| D6 | M4X0.7P | M5X0.8P | M8X1.25P | M12X1.75P | M16X2P | M20X2.5P | M20X2.5P | |
| L1 | 42.6 | 60 | 90 | 115 | 142 | 180 | 220 | |
| L2 | 26 | 37 | 48 | 65 | 97 | 105 | 138 | |
| L3 | 5 | 7 | 10 | 12 | 15 | 20 | 30 | |
| L4 | 5 | 8 | 10 | 10 | 18 | 15 | 20 | |
| L5 | 20 | 28.5 | 35.5 | 51 | 79 | 82 | 105 | |
| L6 | 2 | 3 | 3 | 5 | 5 | 6 | 7 | |
| L7 | 16 | 20 | 30 | 40 | 63 | 70 | 90 | |
| L8 | 4.5 | 4.8 | 7.2 | 10 | 12 | 15 | 15 | |
| L9 | 10 | 12.5 | 19 | 28 | 36 | 42 | 42 | |
| C1* | 46 | 70 | 90 | 145 | 200 | 200 | 200 | |
| C2* | M4X0.7P | M5X0.8P | M6X1P | M8X1.25P | M12X1.75P | M12X1.75P | M12X1.75P | |
| C3* | 8 | 14 | 19≤C3≤22 | 19≤C3≤24 | 22≤C3≤42 | 22≤C3≤42 | 22≤C3≤42 | |
| C4* | 27 | 32.5 | 47 | 67 | 82 | 118 | 119 | |
| C5* | 30 | 50 | 70 | 110 | 114.3 | 114.3 | 114.3 | |
| C6* | 5 | 5 | 5 | 10 | 10 | 10 | 10 | |
| C7* | 42.6 | 60 | 90 | 130 | 180 | 180 | 220 | |
| C9* | 53.25 | 68 | 97 | 126 | 150 | 205.5 | 224 | |
| C10* | 74.5 | 98 | 142 | 183.5 | 221 | 276.5 | 334 | |
| B1 | 5 | 5 | 6 | 10 | 12 | 16 | 20 | |
| H1 | 15 | 18 | 24.5 | 35 | 43 | 59 | 79.5 | |
| C8* | L1 | 108 | 146.5 | 200.5 | 265 | 356 | 387.5 | 494.5 |
| L2 | 128 | 166.5 | 228.5 | 302 | 420 | 446 | 510 | |
| Size | Stage | Ratios | WABR042 | WABR060 | WABR090 | WABR115 | WABR142 | WABR180 | WABR220 |
|---|---|---|---|---|---|---|---|---|---|
| Rated output torque(Nm) | L1 | 3 | 19 | 53 | 145 | 290 | 520 | 950 | 1550 |
| 4 | 20 | 55 | 150 | 300 | 550 | 1000 | 1650 | ||
| 5 | 17 | 54 | 140 | 290 | 530 | 1050 | 1700 | ||
| 6 | 19 | 53 | 145 | 290 | 520 | 950 | 1550 | ||
| 7 | 14 | 44 | 125 | 270 | 450 | 960 | 1500 | ||
| 8 | 20 | 55 | 150 | 300 | 550 | 1000 | 1650 | ||
| 9 | 11 | 37 | 95 | 220 | 360 | 950 | 1550 | ||
| 10 | 11 | 37 | 95 | 220 | 360 | 1050 | 1700 | ||
| 14 | 14 | 44 | 125 | 271 | 450 | 960 | 1500 | ||
| 18 | 11 | 37 | 95 | 220 | 360 | 800 | 1250 | ||
| 20 | 11 | 37 | 95 | 220 | 360 | 800 | 1250 | ||
| 12 | 19 | 53 | 145 | 290 | 520 | 950 | 1550 | ||
| 15 | 19 | 53 | 145 | 290 | 520 | 950 | 1550 | ||
| 20 | 20 | 55 | 150 | 300 | 550 | 1000 | 1650 | ||
| 25 | 17 | 54 | 140 | 290 | 530 | 1050 | 1700 | ||
| 30 | 19 | 53 | 145 | 290 | 520 | 950 | 1550 | ||
| 35 | 17 | 54 | 140 | 290 | 530 | 1050 | 1700 | ||
| L2 | 40 | 20 | 55 | 150 | 300 | 550 | 1000 | 1650 | |
| 45 | 17 | 54 | 140 | 290 | 630 | —— | —— | ||
| 50 | 17 | 54 | 140 | 290 | 530 | 1050 | 1700 | ||
| 70 | 17 | 54 | 140 | 290 | 530 | 1050 | 1700 | ||
| 90 | 17 | 54 | 140 | 290 | 530 | — | — | ||
| 100 | 17 | 54 | 140 | 290 | 530 | 1050 | 1700 | ||
| Max instantaneous output torque(Nm) | L1, L2 | 3 times rated output torque | |||||||
| Return backlashP0(arcmin) | L1 | 3~10 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 |
| L2 | 12~100 | ≤8 | ≤8 | ≤8 | ≤8 | ≤8 | ≤8 | ≤8 | |
| Return backlashP1(arcmin) | L1 | 3~10 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 |
| L2 | 12~100 | ≤10 | ≤10 | ≤10 | ≤10 | ≤10 | ≤10 | ≤10 | |
| Return backlashP2(arcmin) | L1 | 3~10 | ≤9 | ≤9 | ≤9 | ≤9 | ≤9 | ≤9 | ≤9 |
| L2 | 12~100 | ≤12 | ≤12 | ≤12 | ≤12 | ≤12 | ≤12 | ≤12 | |
| Rated input speed(rpm) | L1, L2 | 3~100 | 5000 | 3000 | 3000 | 3000 | 3000 | 1500 | 1500 |
| Max input speed(rpm) | L1, L2 | 3~100 | 10000 | 6000 | 6000 | 6000 | 6000 | 3000 | 3000 |
| Torsional stiffness(Nm/arcmin) | L1, L2 | 3~100 | 2.5 | 6 | 12 | 23 | 45 | 148 | 220 |
| Allowable radial Load(N) | L1, L2 | 3~100 | 515 | 1010 | 1780 | 3420 | 5380 | 8330 | 11120 |
| Allowable axial load(N) | L1, L2 | 3~100 | 410 | 600 | 1500 | 2650 | 4670 | 6460 | 8560 |
| Noise(dB) | L1, L2 | 3~100 | 62 | 63 | 65 | 70 | 70 | 73 | 75 |
| Life(hrs) | L1, L2 | 3~100 | 20,000(10,000 continue operating) | ||||||
| Efficiency at full load(%) | L1 | 3~10 | ≥97% | ||||||
| L2 | 12~100 | ≥94% | |||||||
| Temperature(°c) | L1, L2 | 3~10 | -10℃~+90℃ | ||||||
| Weight(KG) | L1 | 3~10 | 1 | 1.3 | 3.5 | 7.8 | 16.1 | 30 | 58 |
| L2 | 12~100 | 1.4 | 2 | 5.6 | 9.5 | 19 | 42 | 67 | |
| Degree of protection | L1, L2 | 3~100 | IP65 | ||||||
| Grease | L1, L2 | 3~100 | Fully Synthetic Grease | ||||||
| Transmission inertia of reducer | |||||||||
| Size | Stage | Ratios | WABR042 | WABR060 | WABR090 | WABR115 | WABR142 | WABR180 | WABR220 |
| Moment of inertia(kg.cm) | 3 | 0.06 | 0.23 | 0.98 | 2.36 | 10.1 | 31 | 79.63 | |
| 4 | 0.06 | 0.18 | 0.68 | 1.68 | 7.3 | 26 | 59.3 | ||
| L1 | 5 | 0.06 | 0.17 | 0.66 | 1.55 | 6.58 | 23.8 | 54.86 | |
| 6/7/8 | 0.06 | 0.15 | 0.6 | 1.48 | 6.22 | 23 | 54.32 | ||
| 9/10/14/18/20 | 0.06 | 0.14 | 0.58 | 1.45 | 6.15 | 22.9 | 54 | ||
| 12/15/18/20 | 0.05 | 0.18 | 0.68 | 2.4 | 6.52 | 24.27 | 54.37 | ||
| L2 | 30/35/40 | 0.05 | 0.15 | 0.68 | 1.68 | 6.52 | 23.82 | 54.37 | |
| 45/50/70 | 0.05 | 0.15 | 0.6 | 1.51 | 6.21 | 22.94 | 53.3 | ||
| 80/90/100 | 0.05 | 0.14 | 0.6 | 1.41 | 6.1 | 22.75 | 52.45 | ||
Anwendungsindustrie
Geeignet für ein breites Anwendungsspektrum
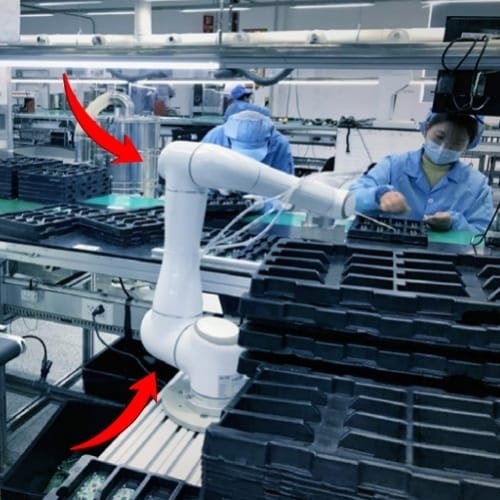
Kooperativer Roboter
Mehrgelenkmaschine

Laser-Schneide-Maschine
Werkzeugmaschinen, Schleifmaschinen

PARALLELMANIPULATOR
Scara-Roboter, Spinnenhand...

INDUSTRIEROBOTER
Manipulator, Achsroboter usw

Humanoider Roboter
Bionischer Roboter, Laufroboter
AGV CAE
Lagerlogistik-AGV-Wagen
WERKZEUGMASCHINE
Rohrbiegemaschine...
CNC-Schnitzmaschine
Schnitzen und Drucken von Zahnprothesen

EXTERNE ROBOTER
Gewichtsrehabilitation...
Fabriken von Fubao Mechanic Tech











Jetzt Angebot