 Deutsch
Deutsch English
English Русский
Русский Español
Español













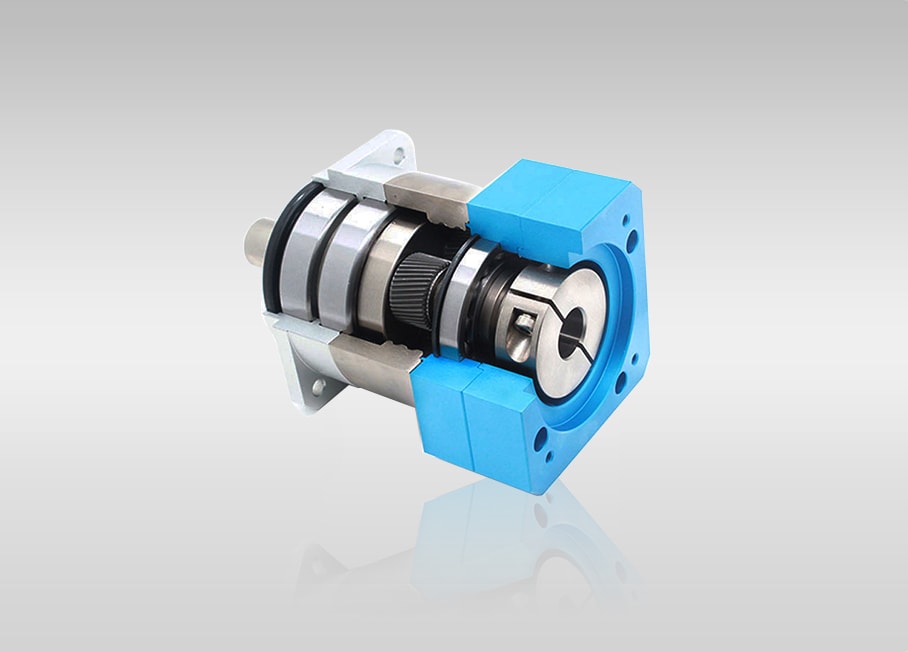
Merkmale des geraden Planetengetriebes der WPG-Serie
1. Das Außengetriebe besteht aus hochwertigem 20CrMnT/20CrMo/SCM415-Material, kontrollierter Aufkohlung und Abschreckung. Seine Oberflächenhärte beträgt bis zu HRC60±2;
Die Feinwalz-/Schleifpräzision der Zahnradoberfläche entspricht JIS2-Niveau; Es verfügt über Merkmale wie stabilen Betrieb, geringe Geräuschentwicklung, hohes Lastdrehmoment und geringes Spiel.
2. Das Innengetriebe wird durch mehrere in Japan übliche Räum- oder Spiralschneidverfahren bearbeitet;
3. Wenn das Planetengetriebe läuft, befindet es sich in einem vollständig engen Eingriffszustand, wodurch die Gefahr von Getriebeschäden durch Getriebekollision oder teilweisen Eingriff verringert wird.
Die Eigenschaften des vollständig engen Eingriffs führen dazu, dass der Wirkungsgradverlust jedes Getriebes nur 3 % beträgt.
Dieser Getriebetyp kann eine hohe Übertragungseffizienz gewährleisten, wenn die kinetische Energie in das Untersetzungsgetriebe und dann zum mechanischen Ende eingespeist wird, und verhindert Reibung, die durch internes Getriebe und Rutschen verursacht wird und zu mechanischen Verlusten führt.
4. Der modulare Aufbau der Eingangswelle des Untersetzungsgetriebes ist für jeden Hersteller und jeden Motortyp geeignet;
Der hintere Übergangsflansch des Reduzierstücks besteht aus einem Magnesium-Aluminium-Legierungsmaterial, das nach der Oberflächenbehandlung ein schönes Aussehen, ein geringes Gewicht und eine gute Wärmeableitung aufweist;
5. Alle Untersetzungsgetriebemodelle sind mit Skelettöldichtungen ausgestattet, um ein Austreten von Öl während des Hochgeschwindigkeitsbetriebs des Untersetzungsgetriebes zu verhindern. Standardteile wie Lager und Öldichtungen übernehmen internationale und inländische bekannte Markenprodukte;
6. Der Schaft besteht aus legiertem Stahl und ist vergütet, um den Anforderungen an Festigkeit und Zähigkeit gerecht zu werden.
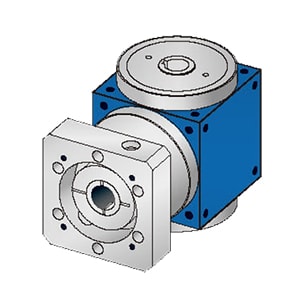
Zeichnungen des geraden Planetengetriebes der WPG-Serie

Parameter des geraden Planetengetriebes der WPG-Serie
| Size | WPG042 | WPG060 | WPG070 | WPG080 | WPG090 | WPG115 | WPG130 | WPG142 | WPG215 | |
|---|---|---|---|---|---|---|---|---|---|---|
| D1 | 50 | 70 | 85 | 90 | 100 | 130 | 160 | 185 | 235 | |
| D2 | 3.4 | 5.5 | 5.5 | 6.5 | 6.5 | 8.5 | 11 | 11 | 13.5 | |
| D3h6 | 10 | 14 | 16 | 20 | 22 | 25 | 32 | 40 | 55 | |
| D4g6 | 26 | 50 | 50 | 70 | 80 | 110 | 120 | 130 | 180 | |
| D5 | 14 | 17 | 20 | 25 | 25 | 35 | 40 | 60 | 65 | |
| D6 | M5X0.8P | M5X0.8P | M5X0.8P | M6X1P | M8X1.25P | M10X1.5P | M12X1.75P | M12X1.75P | M20X2.5P | |
| D10 | 42 | 60 | 70 | 80 | 90 | 115 | 140 | 162 | 205 | |
| L1 | 42 | 60 | 75 | 90 | 95 | 120 | 145 | 175 | 215 | |
| L2 | 26 | 35 | 35 | 40 | 46 | 55 | 75 | 87 | 90 | |
| L3 | 2 | 3 | 5 | 3 | 5 | 4 | 5 | 5 | 6 | |
| L4 | 6 | 6 | 7 | 8 | 8 | 10 | 12 | 15 | 20 | |
| L5 | 23 | 30 | 28 | 36 | 36 | 50 | 70 | 80 | 82 | |
| L6 | 3 | 2 | 3 | 3 | 3 | 5 | 6 | 6 | 7.5 | |
| L7 | 16 | 25 | 25 | 30 | 30 | 40 | 55 | 65 | 70 | |
| L8 | 1 | 1 | 1 | 1 | 1 | 3 | 4 | 4 | 4 | |
| L9 | 10 | 10 | 10 | 12 | 12 | 23 | 30 | 30 | 42 | |
| C1* | 46 | 70 | 70 | 90 | 90 | 145 | 200 | 200 | 200 | |
| C2* | M4X0.7P | M5X0.8P | M5X0.8P | M6X1P | M6X1P | M8X1.25P | M12X1.75P | M12X1.75P | M12X1.75P | |
| C3* | 6≤C3≤8 | 8≤C3≤14 | 8≤C3≤14 | 11≤C3≤22 | 11≤C3≤22 | 19≤C3≤24 | 19≤C3≤24 | 22≤C3≤42 | 22≤C3≤42 | |
| C4* | 27 | 32.5 | 32.5 | 45.5 | 45.5 | 60 | 82 | 82 | 82 | |
| C5* | 30 | 50 | 50 | 70 | 70 | 110 | 114.3 | 114.3 | 114.3 | |
| C6* | 6 | 5 | 5 | 5 | 5 | 10 | 10 | 10 | 10 | |
| C7* | 42 | 60 | 60 | 90 | 90 | 130 | 180 | 180 | 180 | |
| B1 | 3 | 5 | 5 | 6 | 6 | 8 | 10 | 12 | 16 | |
| H1 | 11.2 | 16 | 18 | 22.5 | 24.5 | 28 | 35 | 43 | 59 | |
| C8* | L1 | 88 | 110 | 121.5 | 153 | 153 | 219 | 203.5 | 296 | 242 |
| L2 | 98.3 | 126.5 | 139.5 | 178 | 178 | 237 | 273.5 | 335 | 349.5 | |
| Size | Stage | Ratios | WPG042 | WPG60 | WPG70 | WPG80 | WPG90 | WPG115 | WPG130 | WPG142 | WPG215 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Rated output torque(Nm) | L1 | 3 | 4.5 | 20 | 22 | 65 | 75 | 120 | 195 | 400 | 1050 |
| 4 | 15 | 31 | 45 | 75 | 85 | 215 | 600 | 800 | 1780 | ||
| 5 | 14 | 39 | 41 | 88 | 100 | 230 | 505 | 700 | 1600 | ||
| 7 | 8 | 25 | - | 80 | 80 | 160 | 325 | 550 | 1000 | ||
| 8 | - | 15 | 18 | 50 | 55 | 120 | 210 | 450 | 950 | ||
| 10 | 5 | 15 | 15 | 50 | 50 | 110 | 160 | 210 | 305 | ||
| L2 | 12 | 18 | 20 | 45 | 75 | 75 | 120 | 195 | 800 | 1780 | |
| 15 | 18 | 20 | 41 | 75 | 75 | 120 | 195 | 700 | 1600 | ||
| 16 | 20 | - | 45 | - | - | - | - | 800 | 1780 | ||
| 20 | 20 | 31 | 45 | 85 | 85 | 215 | 600 | 800 | 1000 | ||
| 25 | 18 | 39 | 41 | 100 | 100 | 230 | 505 | 700 | 1780 | ||
| 30 | - | 20 | 41 | 75 | 75 | 120 | 195 | 700 | 1600 | ||
| 35 | 18 | 39 | 22 | 100 | 100 | 230 | 505 | 550 | 1780 | ||
| 40 | 20 | 31 | 41 | 85 | 85 | 215 | 600 | 700 | 1600 | ||
| 50 | 18 | 39 | 25 | 100 | 100 | 230 | 505 | 450 | 700 | ||
| 70 | 10 | 25 | - | 80 | 80 | 160 | 325 | - | - | ||
| 100 | - | 15 | 45 | 50 | 50 | 110 | 160 | 800 | 1780 | ||
| Max output torque(Nm) | L1,L2 | 2.0 times Batedoatpat torque | |||||||||
| Return backlash(arcmin) | L1 | 3~10 | ≤12 | ≤10 | ≤10 | ≤10 | ≤10 | ≤10 | ≤10 | ≤8 | ≤8 |
| L2 | 12~70 | ≤15 | ≤12 | ≤12 | ≤12 | ≤12 | ≤12 | ≤12 | ≤10 | ≤10 | |
| Rated input speed(rpm) | L1,L2 | 3~100 | 3000 | 4000 | 4000 | 4000 | 4000 | 3500 | 3000 | 3000 | 4000 |
| Max input speed(rpm) | L1,L2 | 3~100 | 6000 | 8000 | 8000 | 8000 | 8000 | 6000 | 6000 | 4500 | 4000 |
| Torsional stiffness(Nm/arcmin) | L1,L2 | 3~100 | - | 2.1 | - | 4.6 | 5.5 | 12 | 30 | - | - |
| Allowable Radial Load(N) | L1,L2 | 4~100 | 200 | 320 | - | 510 | 550 | 1600 | 4500 | - | - |
| Allowable axial load(N) | L1,L2 | 4~100 | 160 | 280 | - | 460 | 500 | 1350 | 2800 | - | - |
| Noise(dB) | L1,L2 | 4~100 | ≤58 | ≤61 | ≤58 | ≤63 | ≤63 | ≤68 | ≤78 | ≤70 | ≤70 |
| Life(hrs) | L1,L2 | 4~100 | 20000 | ||||||||
| Efficency(%) | L1 | 4~10 | ≥97 | ||||||||
| L2 | 16~100 | ≥94 | |||||||||
| Temperature(°C) | L1,L2 | 16~100 | -10℃~+90℃ | ||||||||
| Degree of protection | L1,L2 | 16~100 | IP65 | ||||||||
| Grease | L1,L2 | 16~100 | Fully Synthetic Grease | ||||||||
| Transmission inertia of reducer | |||||||||||
| Size | Stage | Ratios | WPG042 | WPG60 | WPG70 | WPG80 | WPG90 | WPG115 | WPG130 | WPG142 | WPG215 |
| Moment of inertia(kg.cm) | L1 | 3 | 0.31 | 0.17 | 0.165 | 0.63 | 0.63 | 3.45 | 9.58 | 12.14 | 251.6 |
| 4 | 0.22 | 0.15 | 0.039 | 0.55 | 0.55 | 2.86 | 8.65 | 7.78 | 243 | ||
| 5 | 0.019 | 0.14 | 0.078 | 0.49 | 0.49 | 2.85 | 8.44 | 6.07 | 232.4 | ||
| 7 | 0.017 | 0.13 | - | 0.54 | 0.45 | 2.85 | 7.35 | - | - | ||
| 10 | 0.015 | 0.13 | 0.063 | 0.44 | 0.44 | 2.61 | 7.11 | 4.6 | - | ||
| L2 | 12 | 0.029 | 0.05 | - | 0.17 | 0.17 | 0.63 | 3.45 | - | - | |
| 15 | 0.023 | 0.15 | 0.039 | 0.15 | 0.15 | 0.55 | 2.86 | 7.47 | 55.3 | ||
| 20 | 0.022 | 0.04 | 0.049 | 0.14 | 0.14 | 0.49 | 2.85 | 6.95 | 52.1 | ||
| 25 | 0.019 | 0.04 | 0.039 | 0.13 | 0.13 | 0.45 | 2.61 | 5.65 | 52.1 | ||
| 30 | - | 0.04 | - | 0.13 | 0.13 | 0.44 | 2.61 | - | - | ||
| 35 | 0.017 | 0.04 | - | 0.13 | 0.13 | 0.44 | 2.61 | - | - | ||
| 40 | 0.015 | 0.04 | 0.027 | 0.13 | 0.13 | 0.44 | 2.61 | 5.81 | 50.09 | ||
| 50 | 0.015 | 0.04 | - | 0.13 | 0.13 | 0.44 | 2.61 | - | - | ||
| 70 | 0.015 | 0.03 | - | 0.13 | 0.13 | 0.44 | 2.61 | - | - | ||
| 100 | - | 0.03 | 0.016 | 0.13 | 0.13 | 0.44 | 2.61 | 6.1 | - | ||
Anwendungsindustrie
Geeignet für ein breites Anwendungsspektrum
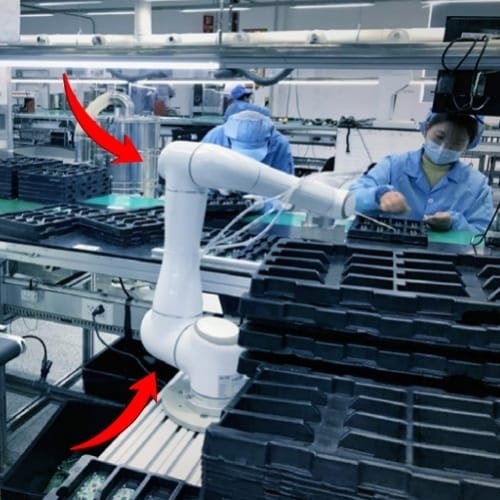
Kooperativer Roboter
Mehrgelenkmaschine

Laser-Schneide-Maschine
Werkzeugmaschinen, Schleifmaschinen

PARALLELMANIPULATOR
Scara-Roboter, Spinnenhand...

INDUSTRIEROBOTER
Manipulator, Achsroboter usw

Humanoider Roboter
Bionischer Roboter, Laufroboter
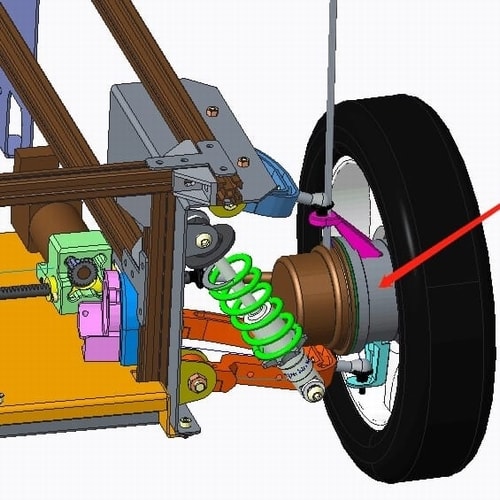
AGV CAE
Lagerlogistik-AGV-Wagen
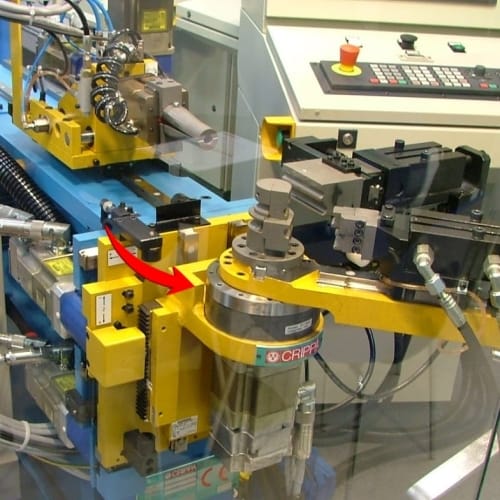
WERKZEUGMASCHINE
Rohrbiegemaschine...
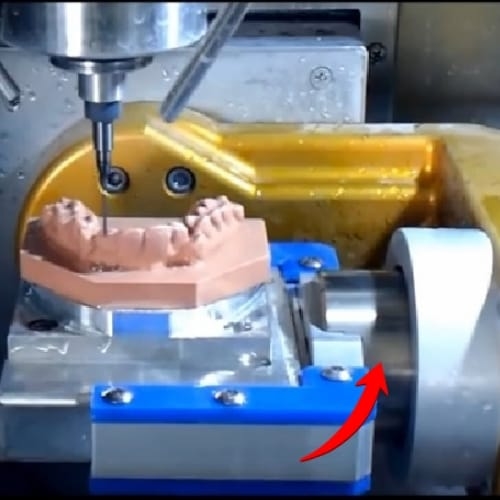
CNC-Schnitzmaschine
Schnitzen und Drucken von Zahnprothesen

EXTERNE ROBOTER
Gewichtsrehabilitation...
Fabriken von Fubao Mechanic Tech











Jetzt Angebot